(dr) ESA
O módulo Schiaparelli despenhou-se em Marte no dia 19 de Outubro. Agora, o inquérito sobre a queda da sonda está concluído e revela que “as informações contraditórias no computador de bordo causaram o fim prematuro da sequência de descida”.
A parte inicial da missão foi um sucesso: o módulo separou-se da sonda científica Trace Gas Orbiter (TGO) e, quando entrou na atmosfera de Marte, o paraquedas abriu a uma altitude de 12 km e a uma velocidade de 1730 km/h.
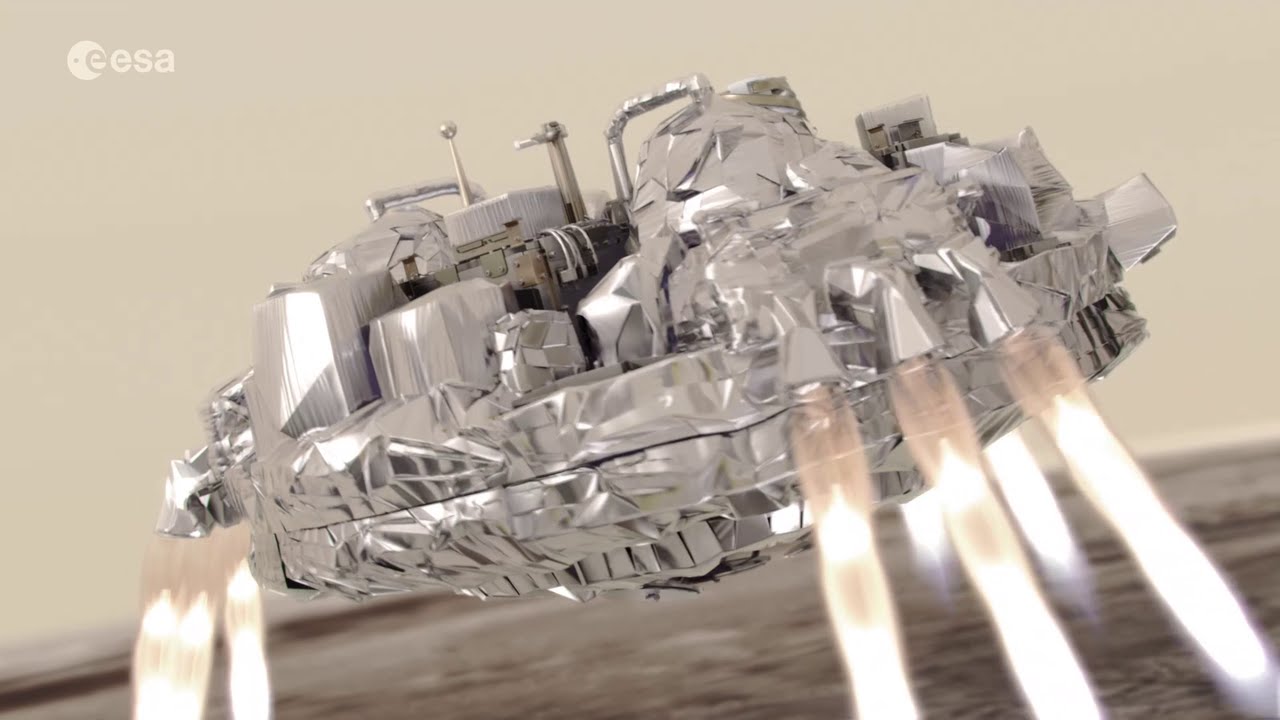
No entanto, um erro desencadeou uma libertação prematura do paraquedas e da concha traseira, um breve disparo dos propulsores de travagem e, finalmente, a ativação dos sistemas terrestres como se o Schiaparelli já tivesse aterrado – quando, na realidade, o veículo ainda estava a uma altitude de aproximadamente 3,7 km.
Desta forma, a sonda Schiaparelli acabou por se dirigir ao planeta vermelho a cerca de 540 quilómetros por hora em vez de travar suavemente para a aterragem.
A investigação, conduzida por peritos e divulgada na quarta-feira à noite, confirma a primeira hipótese avançada pela agência em novembro. O relatório final refere que a queda da Schiaparelli se deveu um erro transmitido pelo software de navegação que fez com que surgissem estimativas de altitude erradas.
Isto significa que a fase terminal da descida foi ativada demasiado cedo e a Schiaparelli entrou em queda livre, ficando desfeita ao atingir o solo marciano após 33 segundos.
O diretor geral da ESA, Jan Wörner, salienta que o módulo “esteve muito perto de pousar com sucesso em Marte”, e que a esta falha não põe em causa o sucesso da missão.
“A cápsula entrou na atmosfera de Marte e todo o hardware e sensores produziram uma quantidade enorme de dados, e esse era o objetivo mais importante do teste”, destacou.
A sonda-mãe Trace Gas Orbiter (TGO) continua a orbitar Marte, onde tentará encontrar indícios de metano e outros gases que podem indicar a presença de vida, além de também funcionar como uma estação de retransmissão de dados para a sonda que será enviada dentro de três anos.













Estimado(a)s,
Ao contrário do que foi mencionado na matéria, o relatório final (divulgado em http://exploration.esa.int/science-e/www/object/doc.cfm?fobjectid=59175) constatou problemas na Unidade de Medida Inercial (IMU) e não no Software de Navegação e Controlo (GNC).
Essas afirmações estão descritas nos ítens 6.2.1, do referido relatório, onde detalha o incorreto funcionamento da IMU, e no ítem 6.3.3, onde descreve, no parágrafo quarto, que a duração da saturação do IMU foi o fator chave para a falha, eximindo o software da culpa no acidente.
O Software de Navegação foi projetado para gerir saturações de até 15 milisegundos e recebeu dados saturados, oriundos da Unidade de Medida Inercial, durante mais de 5 segundos – 30 vezes superior ao projetado – motivo pelo qual não conseguiu calcular corretamente a altura da sonda.
A Unidade de Medida Inercial (IMU) é um “hardware” e foi construída pela empresa estadunidense Honeyewll, enquanto que o GNV é um “software” de navegação desenvolvido pela empresa espanhola GMV.
Trata-se, portanto, de coisas distintas.
Além do mais, ao contrário do que foi mencionado na matéria, a notícia referida no artigo (http://www.esa.int/Our_Activities/Space_Science/ExoMars/Schiaparelli_landing_investigation_completed/(print)) cita no primeiro parágrafo que o erro foi no “Computador de Bordo” e não no “Software de Navegação”.