
O ambiente, o algoritmo complexo, o que não se consegue controlar… e os “truques” que o condutor pode criar na simulação da viagem.
Há quem diga que é a melhor invenção do século XXI. Exagero ou não, o Google Maps ajuda milhões de pessoas na estrada, todos os dias.
A ideia é quase sempre descobrir o melhor percurso para o nosso destino. Entendemos “melhor” como “o mais rápido”, em princípio.
No entanto, muitas vezes o Google Maps não nos mostra o percurso mais curto ou mais rápido para o destino que queremos.
Porquê? Há vários motivos.
O primeiro é o ambiente. Em 2021, uma actualização da aplicação alterou o critério principal quando mostra um percurso: passou a ser o trajecto mais “amigo do ambiente”, mais eficiente a nível de gasto de combustíveis. Ou seja, o primeiro trajecto que aparecia era o menos poluidor, e não o menos rápido.
Não acreditamos que este ainda seja um ponto relevante para muitos utilizadores – porque era (e é) possível mudar isso nas definições. Ou seja, ir às opções e ignorar o ponto em que o Maps sugere, por predefinição, trajectos eficientes. Três anos depois, muita gente já deve ter alterado isso e a própria plataforma foi sendo actualizada.
Mais recentemente, no fórum da própria Google, um utilizador queixou-se de que o Maos não lhe sugere a rota mais rápida, mesmo quando isso está definido no seu telemóvel.
Nos esclarecimentos, lê-se que há vários factores que podem determinar o primeiro trajecto apresentado: portagens, engarrafamentos no percurso supostamente mais curto, ou qualquer tipo de incidente que possa ter causado o bloqueio de qualquer estrada por um motivo específico naquele momento.
Mas, mais do que isso, lê-se em várias respostas que o Google Maps utiliza um algoritmo complexo que ninguém controla e que ninguém percebe, muitas vezes – até porque o Google nunca revela pormenores sobre esses (e outros tipos de) bastidores.
Um “truque”
Ainda há outro motivo que não está em nenhum algoritmo:
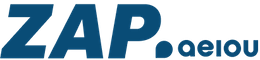
Neste primeiro trajecto aleatório, entre Matosinhos e Porto, demora-se 19 minutos ao percorrer aqueles 6,9 km. É a primeira sugestão do Maps.
Mas agora repare:
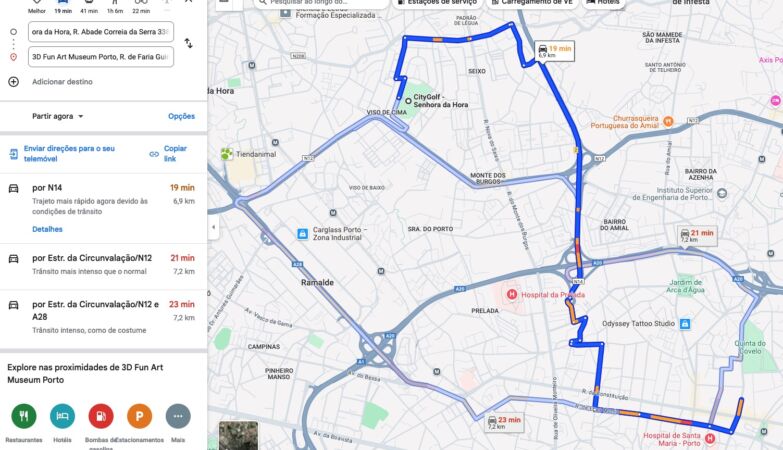
O mesmo local de partida e chegada. Mas acrescentámos uma paragem ali no lado esquerdo, o mapa mudou logo o percurso e ficou…mais rápido. E com menos quilómetros. Passou para 16 minutos e 5,4 km.
Noutro exemplo:
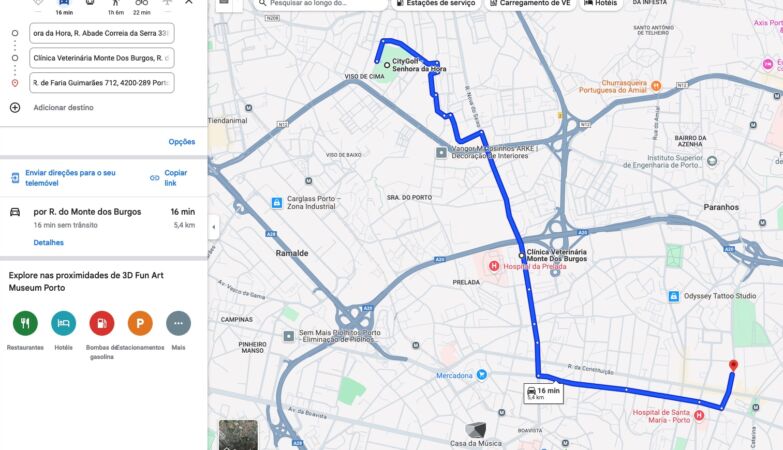
E agora, os mesmos pontos de partida e chegada, mas novamente com um ponto intermédio que o condutor acrescenta:
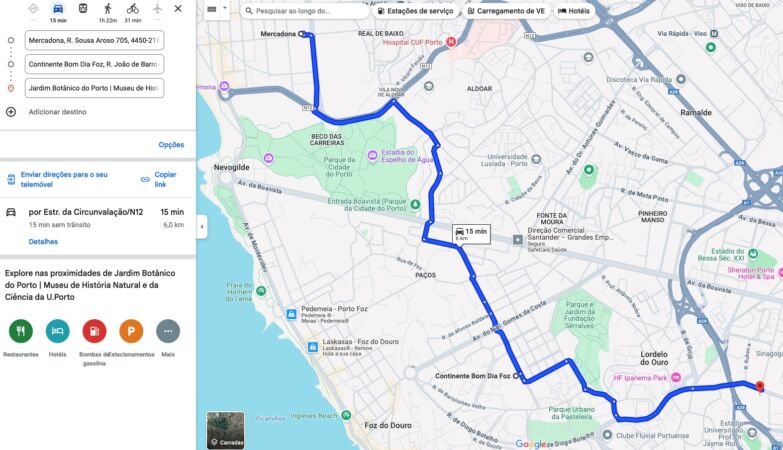
O trajecto ficou 700 metros mais longo mas poupa-se um terço do tempo: de 23 minutos passamos para 15 minutos.
Aqui entram outros factores.
Nos dois casos, a aplicação calcula que o primeiro percurso polui menos o ambiente.
Depois, é uma questão de “experiência” da plataforma. O Maps está mais habituado àquele percurso, é aquele percurso que a grande maioria dos utilizadores percorre. A própria plataforma sente-se mais “segura” ali, se quiser nesses termos.
Por último, é uma questão de “truques”. E aqui entra a experiência…do condutor. As quatro simulações ali em cima foram feitas à mesma hora, no mesmo minuto. Mas com resultados diferentes. Se quem conduz já conhecer a zona, e se fizer contas a certos desvios, pode “fintar” o trânsito, os outros condutores e fintar a própria aplicação. Acrescenta um terceiro local ao trajecto, que sabe que fica a caminho (noutro caminho) e, sim, pode originar percursos bem mais rápidos, como se vê no segundo exemplo.














Parece que emburrecem os algoritmos de propósito. As próprias buscar do Google estão muito piores, quase nunca indicam resultados relevantes na primeira página, só lixo. As sugestões do Youtube são sempre a mesma coisas repetições do que já se viu, tentam impingir sempre os mesmos vídeos, etc. É o que dá ter um monopólio.